Reimagined
 One of the biggest challenges facing the field of technology and engineering today: making self-driving cars smarter and safer. Traditionally, engineers test autonomous machines on a limited number of scenarios. But — as every Angeleno knows — driving in the real world is messy, unpredictable and full of obstacles. The number of possible situations on the road is virtually infinite, which can lead to potentially unsafe behavior without a human driver.
One of the biggest challenges facing the field of technology and engineering today: making self-driving cars smarter and safer. Traditionally, engineers test autonomous machines on a limited number of scenarios. But — as every Angeleno knows — driving in the real world is messy, unpredictable and full of obstacles. The number of possible situations on the road is virtually infinite, which can lead to potentially unsafe behavior without a human driver.
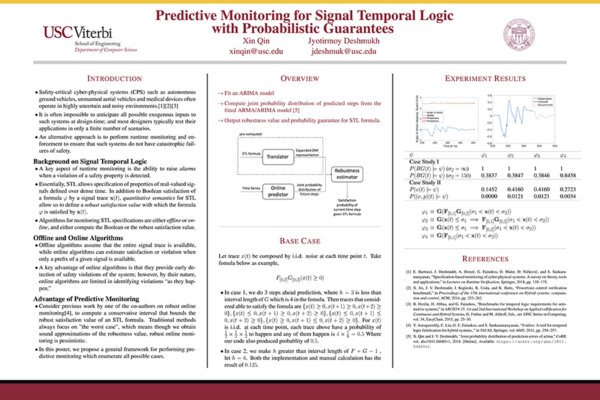
Instead, Jyo Deshmukh, an associate professor of computer science and co-director of the USC Center for Autonomy and AI, and his Ph.D. student Xin Qin, developed a framework that uses a complex system of logic and pattern recognition to predict and mitigate potential risks for self-driving cars in real-time.
At the early signs of a dangerous event, such as a car veering into the opposite lane, the framework would allow the autonomous car to take rational steps to avoid the problem — even when encountering the scenario for the first time.